Инженеры научились управлять микророботами магнитами без камер


Ученые из Южного методистского университета (США) разработали технологию управления микророботами, которая не требует постоянного визуального отслеживания их положения. Исследование опубликовано в IEEE Access. Ранее большинство микророботизированных систем зависели от камер или сложных средств визуализации для навигации в реальном времени, что делало управление медленным, дорогим и ненадежным, особенно в условиях ограниченной видимости.
«В реальных условиях методы визуализации могут быть сложными, медленными, дорогостоящими или ненадежными. Наша система уменьшает или полностью устраняет необходимость отслеживания положения, делая управление проще, надежнее и более практичным даже в труднодоступных местах», — объясняет ведущий разработчик Сангвон Ли.
Как работает магнитное управление
Новая установка использует равномерный градиент магнитного поля, который действует на микророботов одинаково во всей рабочей зоне. Благодаря этому роботы могут двигаться «вслепую», без постоянной корректировки в зависимости от их точного положения, что ранее было ключевым ограничением.
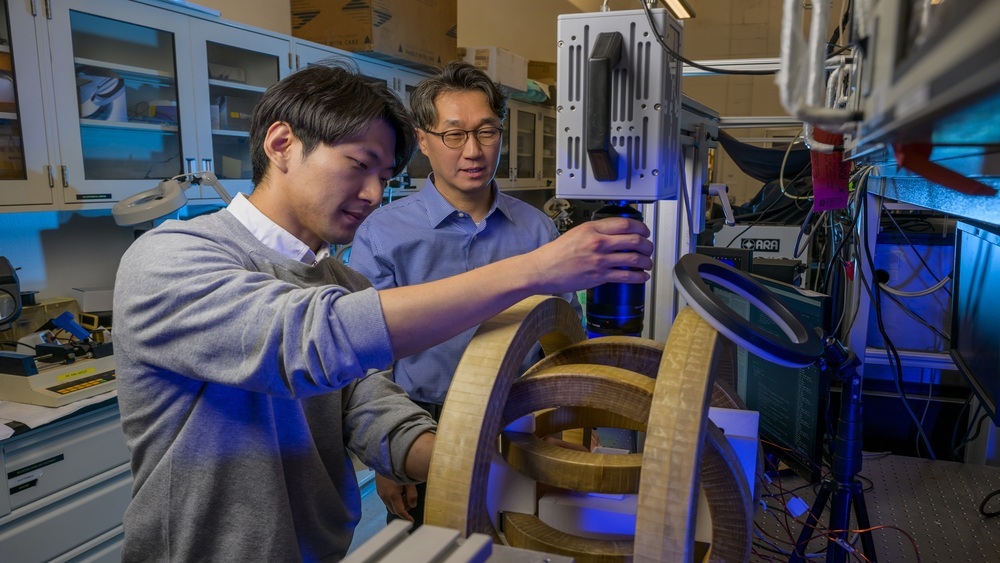
Система использует шесть катушек, собранных в три перпендикулярные пары по осям X, Y и Z, чтобы создавать управляемое магнитное поле во всех направлениях. Для точной настройки исследователи проверяли однородность поля с помощью трехосевого магнитометра и рассчитывали оптимальный ток для каждой катушки с помощью метода регуляризации советского инженера-механика Тихонова — математического подхода, который помогает сгладить погрешности и избежать ошибок из-за небольших несовпадений в установке.
Команда также проводила моделирование с помощью программного обеспечения COMSOL, чтобы смоделировать поведение поля перед экспериментами. В тестах наблюдаемое поведение магнитного поля совпадало с прогнозируемым на 99%, что подтвердило точность и стабильность системы.
Преимущества перед визуальными системами
Отсутствие необходимости в камерах делает систему более универсальной. Роботы могут работать в непрозрачных жидкостях, внутри замкнутых конструкций и узких трубопроводов, где традиционные средства наблюдения неэффективны. Это критично для биомедицинских применений, где микророботы потенциально могут доставлять лекарства в конкретные участки организма, проводить малоинвазивные процедуры или выполнять диагностику в местах, недоступных для обычных инструментов.
Система обеспечивает постоянное магнитное притяжение микророботов по всей области действия. Это упрощает управление: не нужно постоянно получать новые данные о положении каждого робота и корректировать ток катушек.
«За счет уменьшения или полного исключения необходимости отслеживания положения система становится проще и надежнее», — добавляет Ли.
Потенциал для промышленности и медицины
Помимо медицины, технология может быть применена в промышленности — для контроля микророботов в трубопроводах, резервуарах с непрозрачными жидкостями или других замкнутых пространствах.
Исследователи продолжают искать альтернативные методы определения положения микророботов без камер, например с помощью магнитных или инерциальных датчиков, что может еще больше повысить точность и автономность системы. Сочетание продуманной конструкции катушек, калибровки магнитометром, математической оптимизации и моделирования создает надежную платформу для управления микророботами в реальных условиях.
Биоинженеры создали крошечных роботов с нервной системой
Подписывайтесь и читайте «Науку» в MAX