Робота с эластичной гребенкой для прополки сои разработали китайские исследователи
Портал AgroXXI.ru ознакомился со статьей группы инженеров-исследователей из Нанкинского института механизации сельского хозяйства и Ключевой лаборатории современного сельскохозяйственного оборудования МСХ КНР, в которой рассказывается о работе над новым роботом-пропольщиком сои: «Соя – важная продовольственная культура в Китае, посевы которой, как и все сельскохозяйственные поля, подвергаются атаке сорных растений.

Сорняки не только конкурируют с соевыми бобами за воду, солнечный свет, питательные вещества в почве и необходимое пространство для роста, но служат резервуаром для размножения вредителей и патогенов.
С развитием новых сельскохозяйственных технологий методы борьбы с сорняками постоянно совершенствуются. Помимо примитивной ручной прополки появились такие методы, как физическая и механическая прополка, химическая прополка, термическая прополка, биологическая прополка. Среди них чаще применяют химическую прополку и физико-механическую прополку.
Другие методы борьбы с сорняками не получили широкого применения из-за их высокой стоимости, ограничений условий окружающей среды и несоответствия современным экологическим и эффективным концепциям защиты растений. Применение гербицидов является основной формой химической прополки, имеющей такие преимущества, как высокая эффективность и хороший эффект борьбы с сорняками. Однако длительное применение гербицидов влияет на безопасность сотрудников и загрязняет природную среду, а также несет риски устойчивости сорняков.
Оптимизация механической прополки – актуальное направление. По результатам современных исследований механическую прополку можно разделить на междурядную и внутрирядную.
Некоторые исследователи уже оптимизировали ротационную структуру зубьев для механической прополки и провели испытания конструкции. Механизм был объединен с машинным зрением для определения положения сельскохозяйственных культур и управления механизмом при операциях по удалению сорняков. Также существует устройство для прополки рядов, протестированное на кукурузе: оно может определять положение всходов кукурузы и избегать их во время прополки. В устройстве использован гребнезубчатый исполнительный элемент прополки. Средняя эффективность такой прополки составляет 95,1%, а средняя травмированность всходов – 1%.
Технология междурядной прополки довольна успешна, но удаление внутрирядных сорняков сравнительно затруднено. Это связано с тем, что существует риск повреждения растений сои при удалении рядом с ними сорняков. В настоящее время оптимизация и инновации моделей внутрирядной прополки стали горячей темой исследований для многих ученых. Что касается идентификации сорняков, интеграция устройств борьбы с сорняками с такими технологиями, как распознавание изображений, позволяет различать сорняки и растения сои до срабатывания механизма прополки. В качестве примера можно привести сравнительно недорогие лазерные датчики дальности (BL-200NMZ, производства BOJKE, штаб-квартира в Шэньчжэне, Китай), которые обладают такими характеристиками, как высокая точность, высокая скорость и высокая стабильность, избегают влияние на изображение света и тени.
Для решения проблем низкой интенсивности прополки и высокой травмируемости всходов во внутрирядных устройствах борьбы с сорняками для сои было разработано роботизированное возвратно-поступательное эластичное гребенчатое внутрирядное устройство борьбы с сорняками на сое.
Это устройство учитывает характеристики роста и физические особенности растений и сорняков сои, а также агрономические требования к выращиванию сои. Его компонентами, в частности, являются лазерный датчик дальности для определения положения растений сои и запрограммированная модель распознавания растений сои в программируемом логическом контроллере, чтобы определить, является ли растение соей.
Используя данные о скорости движения робота и расстоянии между лазерным датчиком дальности и механизмом прополки, контроллер выдает инструкции серводвигателю (TSDA-C21B, производства Vacsin со штаб-квартирой в Шэньчжэне, Китай) для координации действий во время работ.
Проще говоря, прополочная машина состоит из лазерного датчика дальности, серводвигателя, программируемого логического контроллера и механизма прополки.
Устройство для прополки содержит механизм прополки, систему распознавания, систему управления и мобильную платформу, как показано на рисунке 1 (см.ниже).
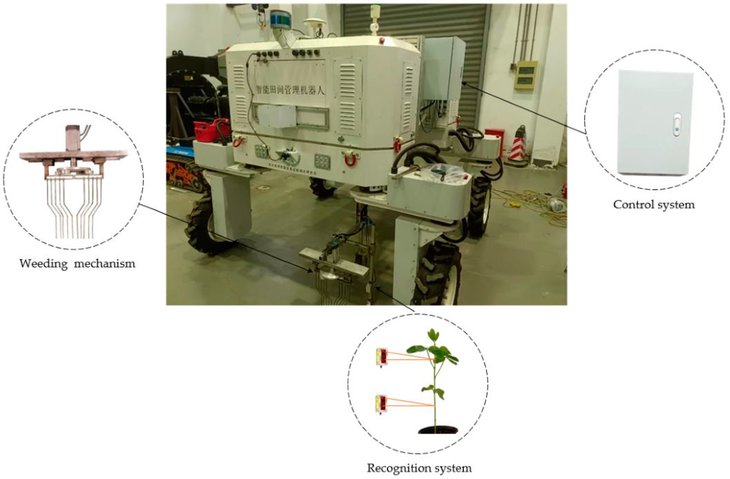
Мобильная платформа, изображенная на рисунке 1 в виде робота для управления полем, в первую очередь отвечает за обеспечение движущей силы для продвижения механизма прополки и подачу энергии в систему распознавания и систему управления. Авторы изображения: Шэнхао Йе, Синьюй Сюэ, Шунинг Си, Ян Сюй, Фэйсян Ле, Лунфэй Цуй, Юнкуй Джин.
Критически важный компонент – упругие и эластичные зубья прополочной гребенки.
Механизм возвратно-поступательной эластичной гребенчатой прополки показан на рисунке 2а (см. ниже). Этот механизм в основном включает в себя серводвигатель, раму, шпиндель, ползунок направляющей, фланцевый диск, шатун, фиксирующий стержень, пластину для расчесывания и упругие зубья расчески.
Серводвигатель управляет вращением фланцевого диска через шпиндель, при этом гребенчатая пластина связана с шатуном и неподвижным стержнем. Когда фланцевый диск приводит в движение шатун, гребенчатая пластина ограничивается горизонтальным перемещением из-за неподвижного стержня и направляющей. Физический вид механизма показан на фото 2б . Чтобы уменьшить повреждение рассады механизмом прополки, эластичные зубья гребенки были разработаны с учетом внешнего вида растений сои. Это сводит к минимуму вероятность контакта эластичных зубьев гребенки со стеблями и листьями растений сои.
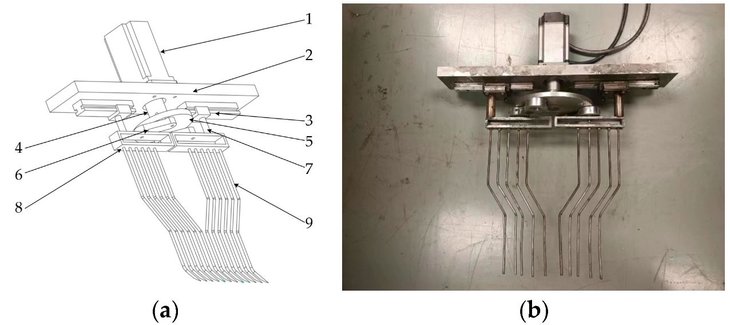
Механизм прополки с возвратно-поступательной упругой гребенкой. Конструктивная схема: 1. серводвигатель; 2. рама; 3. направляющая ползунка; 4. шпиндель; 5. фланцевый диск; 6. шатун; 7. фиксирующий стержень; 8. пластина для расчесывания; 9. эластичные зубцы расчески; (б) фактическое изображение. Авторы изображения: Шэнхао Йе, Синьюй Сюэ, Шунинг Си, Ян Сюй, Фэйсян Ле, Лунфэй Цуй, Юнкуй Джин.
Были проведены эксперименты с использованием экспериментального метода комбинации общего вращения квадратичной регрессии.
Количество гребенок, скорость робота, управляющего полем, и глубина нанесения ударов были взяты в качестве тестовых факторов для изучения их влияния на тестовые показатели скорости прополки и уровня травмирования всходов сои.
В эксперименте использовался метод анализа поверхности отклика и был разработан трехфакторный трехуровневый экспериментальный метод комбинации общего вращения с квадратичной регрессией.
Результаты показывают, что количество зубьев гребенки оказывает наиболее существенное влияние на скорость прополки, а скорость движения оказывает наиболее существенное влияние на степень травмирования всходов. Оптимальное сочетание глубины посева 29,06 мм, пяти зубьев гребенки и скорости движения 0,31 м/с обеспечивает оптимальную рабочую степень прополки 98,2 % и травмированность всходов 1,69 %. При оптимальном сочетании параметров производительность машины может соответствовать требованиям внутрирядной прополки на соевых полях, а результаты исследований могут служить основой для проектирования и оптимизации механических устройств борьбы с сорняками на соевых полях».
По статье группы авторов (Шэнхао Йе, Синьюй Сюэ, Шунинг Си, Ян Сюй, Фэйсян Ле, Лунфэй Цуй, Юнкуй Джин), опубликованной в журнале Agriculture 2023 на портале www.mdpi.com.
Заглавное фото принадлежит указанной группе авторов.
Интересна тема? Подпишитесь на наши новости в ДЗЕН | Канал в Telegram | Группа VK.